 広告掲載のご案内
広告掲載のご案内大規模言語モデルから物理世界の統合モデルへ フィジカルAIで優位を確保
AIの主戦場は、言語処理から現実世界での自律的な行動へと移りつつある。日本では「AIロボティクス戦略」が打ち出され、産業用ロボットで世界をリードしてきた蓄積と現場で培った強みを生かし、フィジカルAIの巨大市場で存在感を見せるべく機会をうかがう。
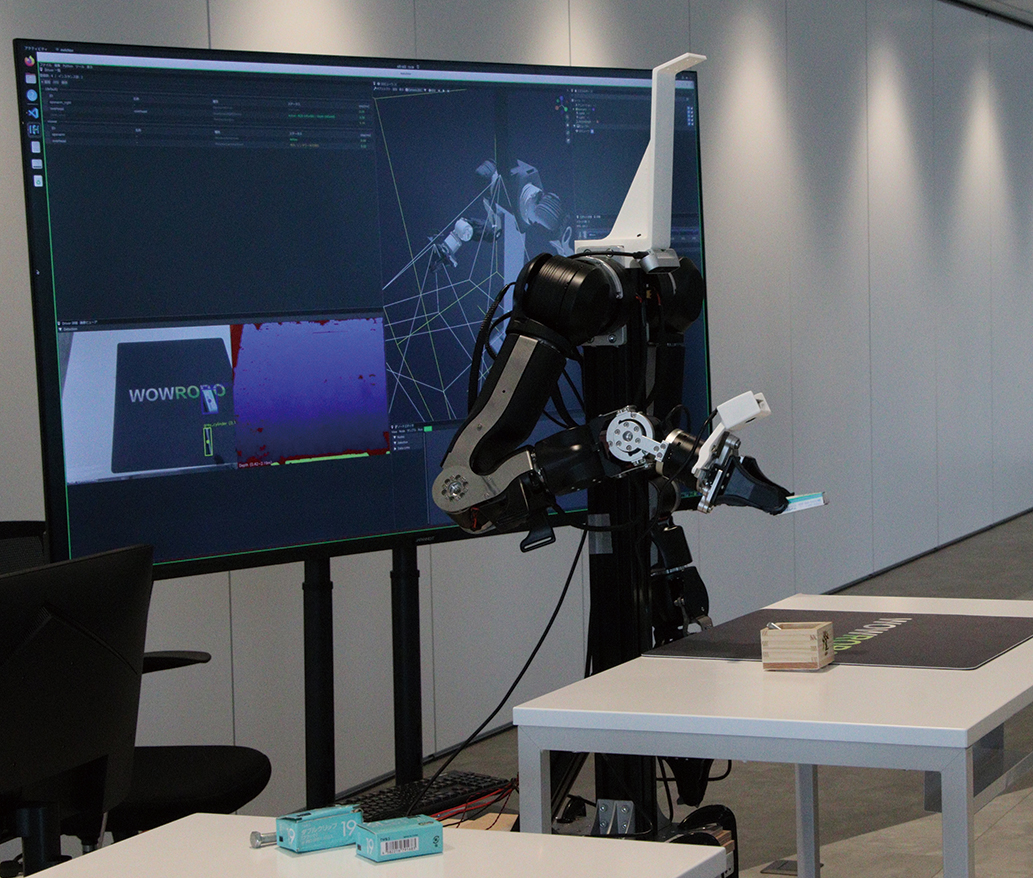
フィジカルAIの開発・実証を進めるスタートアップ企業の燈では、AIロボティクスのためのシミュレーション基盤「Melchior」を構築。組立加工の工場などで用いるロボットアームを動かすAIの開発などに活用
視覚・言語・行動の統合モデルが
AIに物理的な「身体」を与える
画像・音声・動画と、様々なセンサーからのデータを統合し、現実世界を理解した上で、その理解に基づき行動を生成し、物理的なタスクを遂行する人工知能は「フィジカルAI」と呼ばれる。「ChatGPT」や「Claude」をはじめとする大規模言語モデル(LLM)は、言葉を基盤とする日々の業務や生活の中に広く浸透した。これに対し、フィジカルAIはインターネットの閉じた空間から現実世界への進出を目指すAIといえる。
全文をご覧いただくには有料プランへのご登録が必要です。
-
記事本文残り88%
月刊「事業構想」購読会員登録で
全てご覧いただくことができます。
今すぐ無料トライアルに登録しよう!
初月無料トライアル!
- 雑誌「月刊事業構想」を送料無料でお届け
- バックナンバー含む、オリジナル記事9,000本以上が読み放題
- フォーラム・セミナーなどイベントに優先的にご招待
※無料体験後は自動的に有料購読に移行します。無料期間内に解約しても解約金は発生しません。