 広告掲載のご案内
広告掲載のご案内NTT・クボタ・ドコモ 山間部でロボット農機を遠隔操作する通信技術を実証
NTT、クボタ、NTTドコモの3社は2026年5月25日、山間部におけるロボット農機の遠隔操作・遠隔監視時の通信安定化と映像伝送の継続性を実現する共同実証実験を実施したと発表した。同実証により、モバイル通信と衛星通信を組み合わせた最適制御に加え、映像制御技術を適用することで、通信品質が変動する環境下でも映像の視認性を維持できることを確認し、ロボット農機の遠隔操作・遠隔監視を支える通信基盤としての有効性を示した。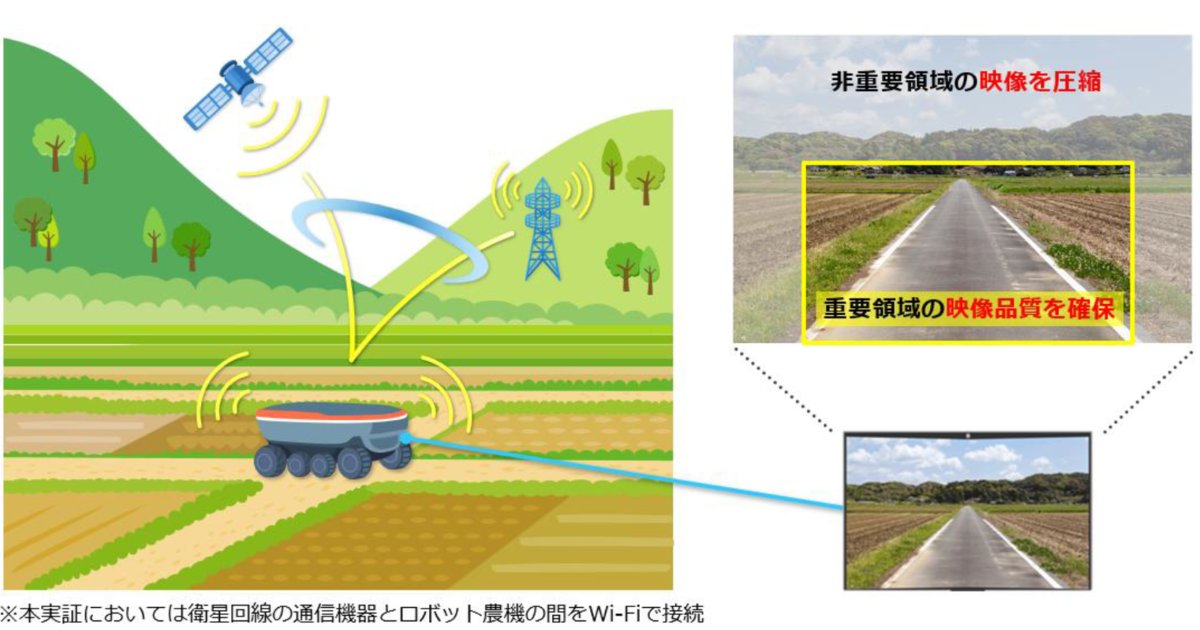
ロボット農機の遠隔操作・遠隔監視における通信・映像制御の将来イメージ
持続可能な農業の実現には、人手不足解消に向けた農作業の自動化や、データを活用した効率的な営農の推進が不可欠となっている。日本政府でもロボット農機の公道走行について、遠隔監視による安全性確保を前提とした規制緩和に向けた制度整備が進められている。一方、日本の耕地面積の約4割を占める中山間地域では、地形や遮蔽物によりモバイル通信環境が変動しやすく、圃場内や圃場間で通信の遅延や切断が発生する可能性があり、安定した映像・データ伝送が実用化に向けた課題となっていた。
今回の実証では、通信状況に応じてモバイル通信と衛星通信の複数回線によるマルチパス制御を行い、モバイル回線の品質が低下しやすい区間で衛星回線を併用することで安定性を確保した。併せて、通信帯域の予測に応じた映像圧縮の自動調整や、進路や農作物が映る重要領域の映像品質を優先的に確保する映像制御技術を適用し、映像伝送の安定性と視認性の両立を実現した。
役割分担では、NTTが無線品質予測技術「Cradio」と複数回線の最適制御技術「協調型インフラ基盤」を、クボタがロボット農機および実証フィールドを、ドコモが映像制御技術をそれぞれ提供した。3社は今後、この技術を活用してロボット農機の遠隔操作・遠隔監視の実用性を高め、将来的な完全無人化につなげる方針。今回の実証内容は、5月27日、28日開催の「つくばフォーラム2026」でNTTが展示する。