 広告掲載のご案内
広告掲載のご案内JR東日本、線路内自律走行型ロボットによる点検推進 AI活用で安全向上と省人化へ
東日本旅客鉄道株式会社は、グループ経営ビジョン「勇翔2034」に掲げる「技術力の深化と進化」により、更なる安全安定輸送の向上やLX(ライフスタイル・トランスフォーメーション)の実現に向けて、AIとロボットを駆使した働き方改革に取り組んでいる。同社は2026年5月8日、線路上を自律走行して点検を行う新型ロボットの開発状況と今後のロードマップを公表した。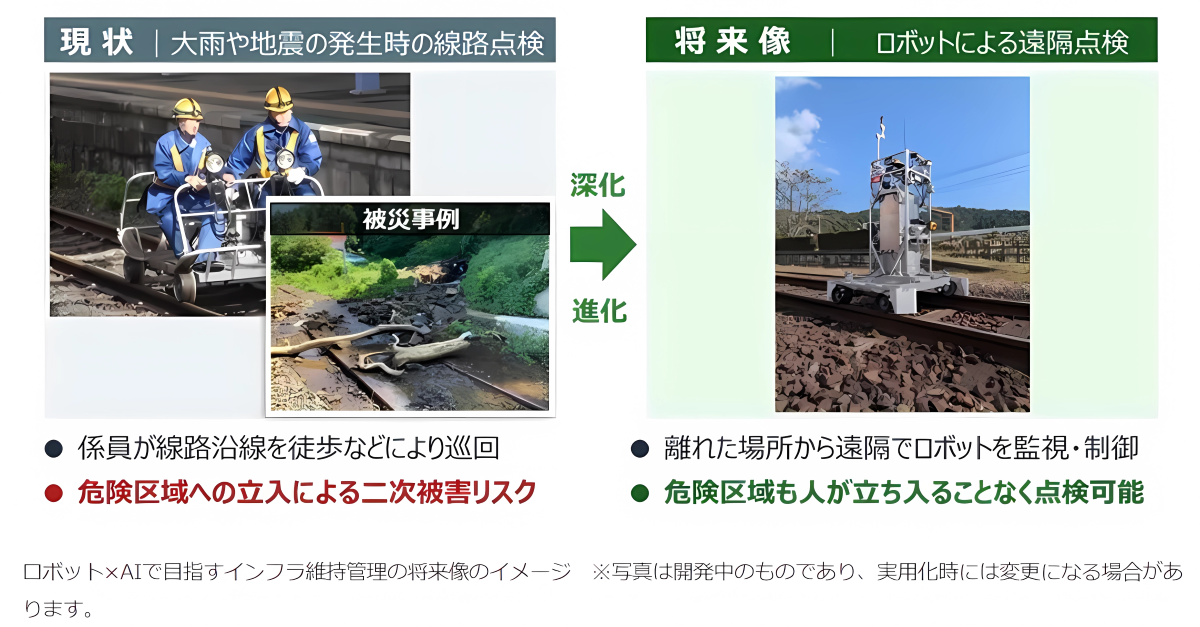
東日本旅客鉄道株式会社公式プレスリリースより
開発の背景と目的
従来の鉄道点検は、大雨や地震などの災害発生時に係員が線路沿線を徒歩で巡回し、路盤の崩壊や土砂流入を目視で確認してきた。しかし、こうした作業は二次被害の危険を伴うほか、近年の熊の出没増加により係員の安全確保が喫緊の課題となっている。
JR東日本では、係員が事務所内などの離れた場所から点検を行える手法の確立を目指し、2024年4月から株式会社Preferred Roboticsと共同でロボット開発に着手した。概念実証(PoC)を2段階にわたって実施し、八高線を含む計6線区で実証実験を経て、実用化に向けた機体製作を進めている。
ロボットの主要機能と特徴
開発中のロボットは、LiDAR(レーザーで周囲との距離を測るセンサー)やGNSS(衛星を利用して位置を把握する仕組み)を搭載し、線路上を自律走行する。搭載カメラと各種センサーで取得した映像やデータは機体内に保存しつつ、遠隔地の係員へリアルタイムで送信される。また、AIが線路周辺の支障物の検知を補助し、列車の運行に支障を及ぼす異常の有無は係員が最終的に判断する仕組みを構築した。これにより、係員が危険区域に立ち入る必要を減らし、災害時の身体的リスクや獣害リスクから解放するとともに、走行ごとに蓄積されるデータを設備管理へ活用することで、点検業務の高度化を図る。
今後のスケジュール
2026年10月末までに実用化に向けた機体製作を完了させ、同年11月以降に在来線を中心とした様々な路線で走行試験を開始する予定だ。
将来的には、取得した映像や3D点群データの設備管理への活用や、ドローンの発着機能の付加による線路周辺のより詳細な状況把握など、ロボティクスとAI技術を活用した鉄道インフラ維持管理業務のさらなる高度化を目指す。安全安定輸送の向上と働き方改革を同時に推進していく構えだ。